
事例紹介


先進技術分野
将来、人との共存ができるロボット、モビリティの普及が予想されており、当社はそれらの実現に不可欠となるさまざま要素技術の先鋭化の活動を行っています。
車載機器の開発を中心に培った機能安全設計技術、多種多様な製品開発で育んだシステム設計開発力、産学連携や共同研究、自社の研究開発活動で獲得した先進的な技術・アルゴリズム群を次世代分野に積極的に展開していきます。




 強みとする技術
強みとする技術
- 画像認識技術
-
- 顔検出・顔認識
- 動体検知、動体追尾
- ステレオカメラ測距、パターンマッチング
- 白線検出、人物検知
- 製品向け画像認識技術
-
- マルチオブジェクト検出
- 歩行者・障害物検知およびファインチューン
- セマンティック・セグメンテーション
- 組み込み機器に最適化するためのニューラルネットワーク シュリンク技術、ハードウェア化技術
- 複数の特徴量を組み合わせることにより、環境ロバスト性の高い認識アルゴリズムを独自開発
- 製品で要求される認識精度を達成するために学習データ収集・作成からソフト・ハードの設計、認識アルゴリズムのチューニングまで車載開発で培った実績を元に適切かつ迅速に判断。商品化/実運用まで最適なコスト・品質レベルで対応。

- モビリティ向けナビゲーション技術
-
- 狭路・障害物接近での走行を可能にする近接ナビゲーション機能
- 不整地やスロープなど起伏のある地形での走行を実現する3D ナビゲーション機能
- 非車輪型移動体に適用可能なカメラベース自己位置測定(ビジュアル・オドメトリ技術)
- ロボティクス技術
-
- 車載開発で培った最先端の機能安全開発をロボット分野に適用可能です(ISO10218-1、ISO13482など)
- ロボット向けの一般的なアーキテクチャを理解し、安全を含む要求分析・システム設計が担当可能です
- 各種SLAMアルゴリズムおよび種別(2D/3D-SLAM、Visual SLAM)の開発経験を有し、実装や最適なパラメータチューニングができます
- ROS、RTミドルウェアを活用したロボットシステム開発および各種コンポーネント(RTC、ノード)開発が可能です
- デジタルヒューマン技術
-
人と共存するロボット・モビリティを考える上で人の負担の軽減、さらには人とマシンの最適な役割分担を導出し全体のパフォーマンスを向上させるためのシステムを設計する必要があります。これを科学的に解くための手法としてデジタルヒューマン技術に着目しています。
人の身体機能をモデル化し、従来のロボット・モビリティのシミュレータと統合することで、人とマシンのインタラクションをバーチャル世界で表現可能となります。これを活用することで、より広い視点で製品・サービスの最適設計が可能となります。
※実際の介護施設において作業負荷を測定し、負荷を低減する最適な支援方法を導出
 事例紹介
事例紹介
-


- 無人化施工技術
(i-Construction) - 建設現場や不整地向けのモビリティやタスクを実現する技術です。自動掘削、積み込み、土砂の運搬の自動化はもちろん、複数重機が共存するエリアにおける衝突回避のための排他制御を導入。安全性を最優先にしつつ作業効率の最大化を図ることができます。
- 無人化施工技術
-

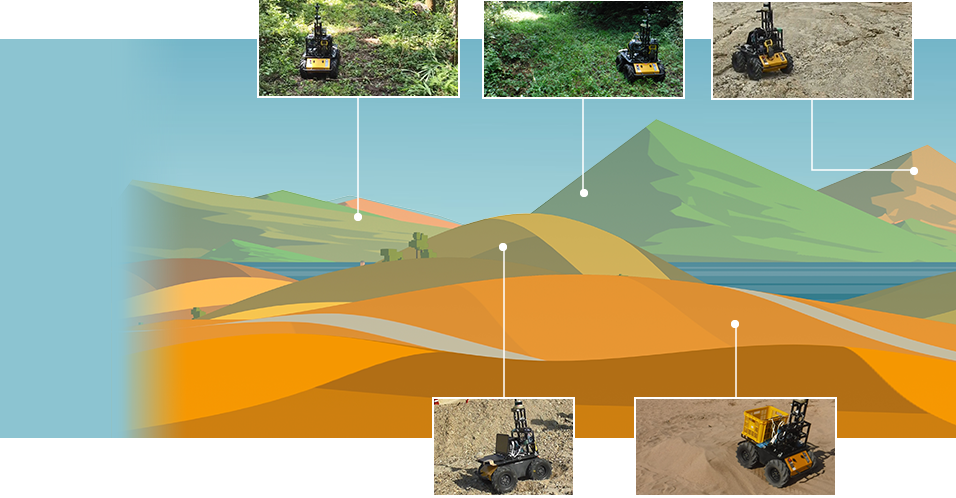
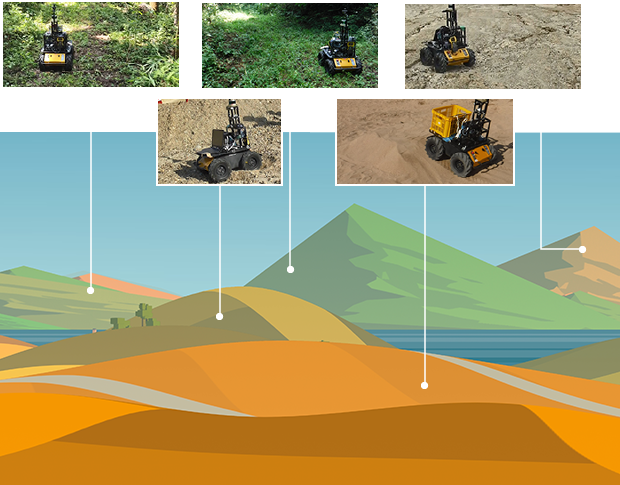
- 不整地の
効率的な走行を実現する
3Dナビゲーション機能 - 不整地での自律走行車両向けソフトウェアの開発を行っています。平坦な路面走行を前提とした既存の自律走行アルゴリズムでは、土木建設・森林・農地など、凸凹や斜面が入り組んだ不整地の自律走行は困難です。当社は、不整地における安全かつ実用的な移動速度での自律走行を目指し、高精度な自己位置推定・凸凹認識、スタックさせないための経路計画などの独自アルゴリズム開発に取り組んでいます。
- 不整地の
-

- 人共存ロボットの
機能安全の研究 - ロボットシステムにおける高機能ソフトウェアの重要性の高まりを想定し、多様なロボットに適用可能かつ機能安全に準拠したソフトウェアアーキテクチャを研究。日本最大級の研究機関である国立研究開発法人産業技術総合研究所(産総研)と連携しながら、ロボットに関する最先端技術の研究・実用化に取り組んでいます。
- 人共存ロボットの
-


- ロボティック・
モビリティの商品開発 - 開発コスト・製品コストの抑制と、製品品質の担保の両立を可能にする技術を保有しています。開発初期のアルゴリズム検討から実施可能で、システム/ソフトウェア設計、開発、検証に加え、実現場でのチューニング、運用時の課題解決まで担当できます。
- ロボティック・

